


Lý thuyết hoạt động cơ bản của động cơ servo không chổi than xoay quanh các nguyên tắc từ tính trong đó các cực cùng tên đẩy nhau và các cực đối diện hút nhau. Có hai nguồn từ tính được tìm thấy trong động cơ servo: Nam châm vĩnh cửu thường nằm trên rôto của động cơ và nam châm điện cố định bao quanh rôto. Nam châm điện được gọi là stato hoặc cuộn dây động cơ và được tạo thành từ các tấm thép gọi là lá mỏng, được liên kết với nhau. Các tấm thép thường có “răng” cho phép quấn dây đồng xung quanh chúng.
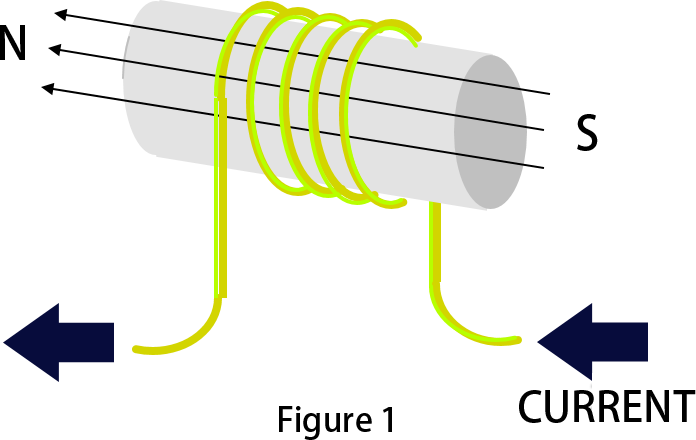
Quay trở lại nguyên lý của từ trường, khi một vật dẫn như dây đồng được tạo thành một cuộn dây, và vật dẫn đó được cấp điện để dòng điện chạy qua thì sẽ tạo ra một từ trường.
Từ trường này được tạo ra bởi dòng điện đi qua dây dẫn sẽ có cực bắc và cực nam. Với các cực từ nằm trên stato (khi có điện) và trên các nam châm vĩnh cửu của rôto, làm thế nào để tạo ra trạng thái các cực đối diện hút nhau và cùng cực đẩy nhau?
Điều quan trọng là đảo ngược dòng điện đi qua nam châm điện. Khi dòng điện chạy qua cuộn dây dẫn theo một hướng sẽ tạo ra cực bắc và cực nam.

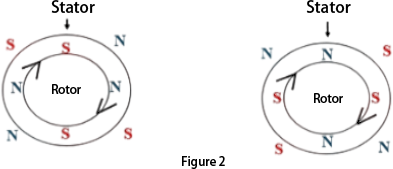
Khi hướng của dòng điện thay đổi, các cực bị đảo ngược nên cực bắc bây giờ là cực nam và ngược lại. Hình 1 cung cấp một minh họa cơ bản về cách thức hoạt động của nó. Trong hình 2, hình ảnh bên trái cho thấy tình trạng các cực của nam châm rôto bị hút vào các cực đối diện của stato. Các cực của rôto được gắn vào trục động cơ sẽ quay cho đến khi chúng thẳng hàng với các cực đối diện của stato. Nếu tất cả đều giữ nguyên thì rôto sẽ đứng yên.
Hình bên phải trong hình 2 cho thấy các cực của stato đã bị lật như thế nào. Điều này sẽ xảy ra mỗi khi cực rôto bắt kịp cực stato đối diện bằng cách đảo ngược dòng điện qua vị trí cụ thể của stato đó. Việc lật liên tục các cực của stato tạo ra tình trạng các cực nam châm vĩnh cửu của rôto luôn “đuổi theo” các cực đối diện của stato dẫn đến trục rôto/động cơ quay liên tục.
Sự đảo cực của các cực stato được gọi là sự chuyển mạch. Định nghĩa chính thức về chuyển mạch là “Hoạt động của dòng điện điều khiển đến các pha động cơ thích hợp để tạo ra mô-men xoắn động cơ và vòng quay trục động cơ tối ưu”. Làm thế nào để dòng điện được điều khiển vào đúng thời điểm để duy trì chuyển động quay của trục?
Việc điều khiển được thực hiện bởi bộ biến tần hoặc bộ truyền động cung cấp năng lượng cho động cơ. Khi một biến tần đang được sử dụng với một động cơ cụ thể, góc lệch sẽ được xác định trong phần mềm biến tần cùng với những thứ khác như độ tự cảm, điện trở của động cơ và các thông số khác. Thiết bị phản hồi được sử dụng trên động cơ (bộ mã hóa, bộ phân giải, v.v.) cung cấp vị trí của trục rôto/cực từ cho bộ truyền động.
Khi vị trí cực từ của rôto trùng với góc lệch thì bộ truyền động sẽ đảo chiều dòng điện đi qua cuộn dây stato từ đó làm thay đổi cực của stato từ bắc xuống nam và từ nam sang bắc như hình 2. Từ đây các bạn có thể thấy rằng để các cực thẳng hàng sẽ dừng quay trục động cơ hoặc thay đổi trình tự sẽ khiến trục quay theo hướng này so với hướng kia và việc thay đổi chúng nhanh chóng cho phép quay tốc độ cao hoặc ngược lại đối với quay trục chậm.






